
�p���Z���T�Ƃ��Ĉ�ʂɒm���Ă�����̂Ɋp���x�Z���T������C�����Ԃ̎p�����o��J�����̎�U���Ȃǂɗ��p����Ă��܂��B�{�|���U�q�ɂ́CMEMS�Z�p��p�������^�Ȋp���x�Z���T�𗘗p���܂����B
 |  |
�p���x�Z���T����͊p���x�ɔ�Ⴕ���d�����o�͂����̂ŁC���̒l���}�C�R����AD�ϊ�����Ζ{�̊p���x�ւ邱�Ƃ��ł��܂��B�܂��C��������Ԑϕ�����Ƃ邱�Ƃ��ł��܂��B �����Œ��ӂ��Ȃ���Ȃ�Ȃ����́C�Ƃ��ϕ��l�ł��邽�߁C���x�ω��ɂ��o�͕ω���m�C�Y���ɂ�蓾����Ƃ����X�Ƀh���t�g���Ă��܂��_�ł��B �����ŁC�p�x���̂��̂����o�ł�������x�Z���T�p�����@��p���܂����B�����x�Z���T��p���ďd�͉����x�����o����C�{�̊p�x�Ƃڌ��o�ł��܂��B �������C�����x�Z���T�ɂ͎��g�̕��i�^���ɂ������x�����m���Ă��܂����_������܂��B�����ŁC�ȉ��̕��@��p���܂����B
���ΓI�Ɍ��āC�p���x�Z���T�͎��g���̍����̈�ŁC�����x�Z���T�͎��g���̒Ⴂ�̈�ŗD��Ă���ƌ����܂��B ����āC�}9.3�̂悤�ɁC�e�X�̏o�͂���t�B���^�ŗ~�����̈悾�����o���Ċp�x���m�ʼn����邱�Ƃɂ��C�K�Ȏԑ̊p�x�Ƃ鎖�ɂ��܂����B
 |  |
�����ŁCLPF��HPF�ɓ������萔�т���������ƁC���҂̓`�B���̘a��1�ƂȂ�܂��B����ƁC�K�v��HPF��LPF�Ŏ������邱�Ƃ��ł��܂��B
�@�@
��L�̕\�������������ǂ����͗ǂ�������܂��E�E�E�B�Ƃɂ����C2�n����LPF�����L�ł���悤�ɂ���ƁC�}9.4�̂悤�Ƀt�B���^����1�ōς܂��邱�Ƃ��ł���̂ŁC�v�Z�������팸���邱�Ƃ��ł���I�B �ڂ��������͂悭�킩��Ȃ��̂Ő���H�w�̋��ȏ������ł��������B
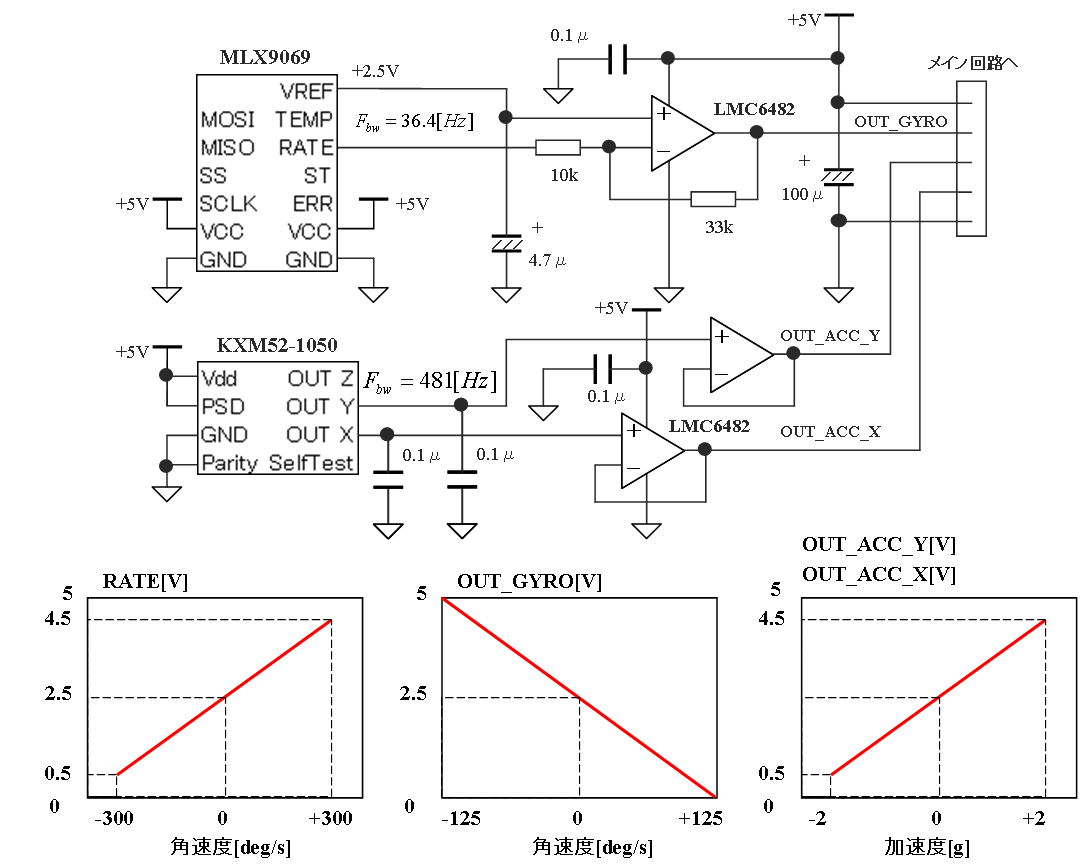
�p���x�Z���T��MLX90609��I�����܂����B���̃Z���T�͊p���x��[deg/s]�ɔ�Ⴕ���d�����o�͂���܂��B�t���X�P�[���iFS�j�́}300[deg/s]����܂��B AD�ϊ��̕���\����̂��߁CCMOS�I�y�A���vLMC6482�ŏo�͐M����-3.3�{�Ŕ��]�������Ă��܂��B
�����x�Z���T��KXM52-1050��I�����܂����B���̃Z���T����͉����x�ɔ�Ⴕ���d�����o�͂��CFS�́}2[g]�ł��B������̐M���o�͂̓{���e�[�W�t�H���������SH/7125��AD�ϊ���ڑ����܂����B
 |
 |  |
�Z���T��H�͍ł��Ⴂ�ʒu�ɐݒu���܂����B���̗��R�́C�����x�Z���T�̕��i�^�����ł��邾���}���邽�߁C�Z���T��H�̉�]���S�Ǝv����Ԏ��ɏo�������Z���T��H���߂Â���ׂ����ƍl��������ł��B
�}�C�R�����LPF���������邽�߁C�I�C���[�@��p���܂����B�v���O�����Ŏ��������v�Z�����ȉ��Ɏ����܂��B
�@�@���萔�т̐ݒ�́C���ۂɃZ���T�̏o�͂��ώ@���Ȃ��獇�킹���ނ��Ƃɂ��܂����B�p�����菇�͈ȉ��̒ʂ�ł��B�{���͂����Ƃ܂Ƃ��ȕ��@�����肻���ł����E�E�E
�����x�Z���T�̏o�͂́C������������p���x�Z���T�̃I�t�Z�b�g�������ł�����x�ɔ��f�ł���悢�ƍl���C���萔�т�100[ms]���珙�X�ɑ傫�����Ă����܂����B ����ƁC�� = 3[s]�œK���ȏo�͂�ꂽ�̂ŁC���̒l��LPF�̎��萔�Ɍ��肵�܂����B�E�E�E�Ȃ�Ƃ������C�蓮�Ŏ��g��������������Ƃ��������ł�
 |
�� = 100[ms]�ɂ����ć@������ƁCLPF�̋@�\�������āC�����x�Z���T�̃m�C�Y�����O�ł��Ă���̂�������܂��B�܂��C�A������Ɗp���x�Z���T�̃I�t�Z�b�g�������ł��Ă��܂��B �������C�B������ƁC�t�B���^�o�͂��p���x�Z���T���狁�߂��p�x�l�̐U����傫�������Ă���C�����x�Z���T�������ߏ�ɔ��f���Ă��邱�Ƃ�������܂��B ����āC�� = 100[ms]�ł�LPF�ɂ��ш搧�����s�\���ł���Ɣ��f���܂����B
 |
�� = 3[s]�ɂ����āC�@��A�̋����̓� = 100[ms]�Ɠ��l�ɗǍD�ł��B����ɁC���萔�����������ʂ��B�Ɍ���C�t�B���^�o�͂̐U���Ɗp���x�Z���T�o�͂̐U���͂قڈ�v����悤�ɂȂ�܂����B �^���Ă���U�����͍ő�1[Hz]�i����1[s]�j���x�Ȃ̂ŁC3[s]�̎��萔�͂��܂��@�\�����݂����ł��B �����ŁC�p���x�Z���T�ϕ��l�̃h���t�g�����Ă݂�ƁC����J�n����킸��16[s]�Ŗ�4[deg]�̃h���t�g�������Ă��܂��B�������C�t�B���^�o�͂̓h���t�g�������ł��Ă���̂œ��ʂ̓|������ɂ͖��Ȃ��ƍl���܂����B ���̃h���t�g�l�ɉ��P�̗]�n�����邩�ǂ����͕�����܂���B
v�邽�߂ɁC���[�^�̓��[�^���G���R�[�_���t��������̂�I�����܂����B���[�^���G���R�[�_����o�͂����2���̃p���X�g�̐�����ԗX�Ίp�x�ӂ�������̂ŁC�ϊ��W�����悶�ē|���������TA�Ŋ���Ύԗ֕��i���xv��������܂��B �܂��C�p���X�g�̈ʑ��i�݂ƒx�ꂩ���]������m�邱�Ƃ��ł��܂��B
 |
SH/7125�ɂ́C���̂悤�ȃp���X�g���v������p���X�J�E���^�@�\�i�ʑ��v���@�\�j���p�ӂ���Ă��܂��B ���̋@�\�����[�q�ɐ}9.9�̂悤�Ȕg�`����͂���C�����̃J�E���^�������Ńp���X�g�̌����v�����Ă���܂��Bv�����߂�v�Z�́C�ȉ��̒ʂ�ł��B
�ʑ��v����2���{�ōs���ƁC���[�^���������200[count]�ł���B�M�����n = 22.4�Ȃ̂ŁC�^�C�����������̃J�E���g����
�@�@�����ŁC1[count]������̑��s��������\��x�́C�^�C���̒��a��80[mm]�Ȃ̂�
�@�@�|���������TA ������̃J�E���g�l�̕ω�����CNT�Ƃ����
�@�@ |
5.2���̃Q�C��F1�`4�͈ȉ��̎菇�Ō��肵�܂����B���̌�����@�͉��炩�̗��_�Ɋ�Â��Ă�����̂ł͂Ȃ��C�����ꓖ����I�ɓK�p�������@�ł�(�G�L�D`A ```
���肵���|�����䎮���ȉ��Ɏ����܂��B
�@�@�������C�e�Q�C���͂ǂ�ȓ|���U�q����邩�ɂ���ĈقȂ��Ă��܂��B�l�̌����Q�l�ɂ�����x�ŁB
 |  |
�������삵�����J�ł͋쓮���̃o�b�N���b�V���傫���C�e�Q�C�����グ�߂���ƃ��[�^���������U�����Ă��܂��܂����B��͂�X�e�b�s���O���[�^�ō��ׂ����������I�H
�E�E�E
���삵���|���U�q�ɏ����ʒux = 150[mm]��^���C���삪��������l�q���ώ@�������ʂ�}��9.13�Ɏ����܂��B����Ԃł́C5[mm]���x�̐U���ň��ʒu�ɗ��܂邱�Ƃ��ł��܂����I�i�}9.15�j
 |
 |  |

